Objektiv halthetsundersøkelse av hest – når menneske og maskin jobber sammen
Halthetsdiagnostikk kan oppleves som noe vagt og uhåndgripelig, spesielt ved mild halthet med små bevegelsesavvik. Tradisjonell visuell halthetsundersøkelse begrenses av det menneskelige øyets temporale oppløsning, som kun oppfatter relativt store bevegelsesavvik. Derimot kan svært små avvik registreres av ulike teknologiske verktøy. Riktig bruk av slike verktøy kan dermed bidra til å raffinere halthetsundersøkelsen, samt å begrense subjektiv bias for eksempel i tolkning av respons på diagnostiske injeksjoner. I denne oversiktsartikkelen gis et overblikk over registrering av bevegelsesasymmetri i forbindelse med halthetsundersøkelser.
PhD, Resident ECVSMR, Dyresykehuset Hest,
NMBU Veterinærhøgskolen
Dipl ECVS, Førstelektor i hestekirurgi, Dyresykehuset Hest,
NMBU Veterinærhøgskolen
PhD, Dipl ECVS, Dipl ECVSMR, Professor i hestekirurgi, Dyresykehuset Hest,
NMBU Veterinærhøgskolen
Innledning
Halthet defineres som et unormalt bevegelsesmønster, og er et klinisk tegn på et underliggende problem (1). Årsaksforhold kan være relatert til smertefulle tilstander i bevegelsessystemet, nevrologiske tilstander eller mekaniske tilstander. Kun halthet forårsaket av smertefulle tilstander i bevegelsessystemet omtales i denne artikkelen.
Som det hyppigst rapporterte helseproblemet hos hest, så vel som den vanligste årsaken til tapte bruksdager, utgjør halthet både et stort velferdsmessig problem, samt en betydelig økonomisk byrde for hestebransjen. Dette gjelder både for den generelle hestepopulasjonen (2-6) og for løpshester. Flere epidemiologiske studier viser like høy forekomst av halthet hos galopphester (7-11) som hos travere (12-16).Halthetsundersøkelse utgjør dermed en stor del av virksomheten for mange veterinærer, der forutsetningen for riktig diagnose er korrekt identifisering av hvilke(t) bein hesten halter på.
Tradisjonelt kategoriseres halthet som smerter under vektbæring (støttehalthet) eller smerter i svingfasen av steget (framføringshalthet) der støttehalthet eller en blandet halthet (både støtte- og framføringshalthet samtidig) er vanligst (17).Den biomekaniske inndelingen av halthet er noe annerledes, her omtales halthet ved hovnedsett (impact) og ved fraskyv av beinet (pushoff) (18). Halthetsundersøkelse gjøres vanligvis i trav, da trav regnes som den mest egnede gangarten for å oppdage asymmetrisk bevegelse (18).
Hestens trav på rett spor
Trav er en rytmisk, totaktig gangart med en koordinert forflytning av diagonale beinpar. I løpet av ett komplett travsteg beveger hestens hode og kropp seg opp og ned to ganger, ned når et diagonalt beinpar er i vektbæring, og opp gjennom svevefasen når dette beinparet har skjøvet fra og før neste beinpar er i vektbæring. Denne vertikale bevegelsen av hestens hode og kropp følger dermed et jevnt, dobbelt sinusformet mønster for hvert komplette travsteg, som hos uhalte hester er symmetrisk mellom de to diagonale beinparene (19). Ved halthet som skyldes en eller flere smertevoldende tilstander i bevegelsessystemet vil hesten aktivt søke å avlaste disse (20,21).Dette resulterer i en forskjell i både vertikal akselerasjon og vertikal bevegelsesamplitude mellom de to halvdelene av travsteget (Figur 1) (22,23). Ved subjektiv halthetsundersøkelse brukes ofte begrepet ‘hodenikking’ om endringen som sees i vertikal bevegelsesamplitude av hodet, og vurdering av dette er den enkleste og mest brukte strategien for å vurdere endringer i bevegelse ved indusert halthet (17,24-26). Den vertikale bevegelsesamplituden, og spesielt endringer i denne ved halthet, er imidlertid mindre for bakparten (kryss og bekken) enn for framparten (hode og manke), hvilket gjør subjektiv vurdering av bakbeinshalthet vanskeligere.
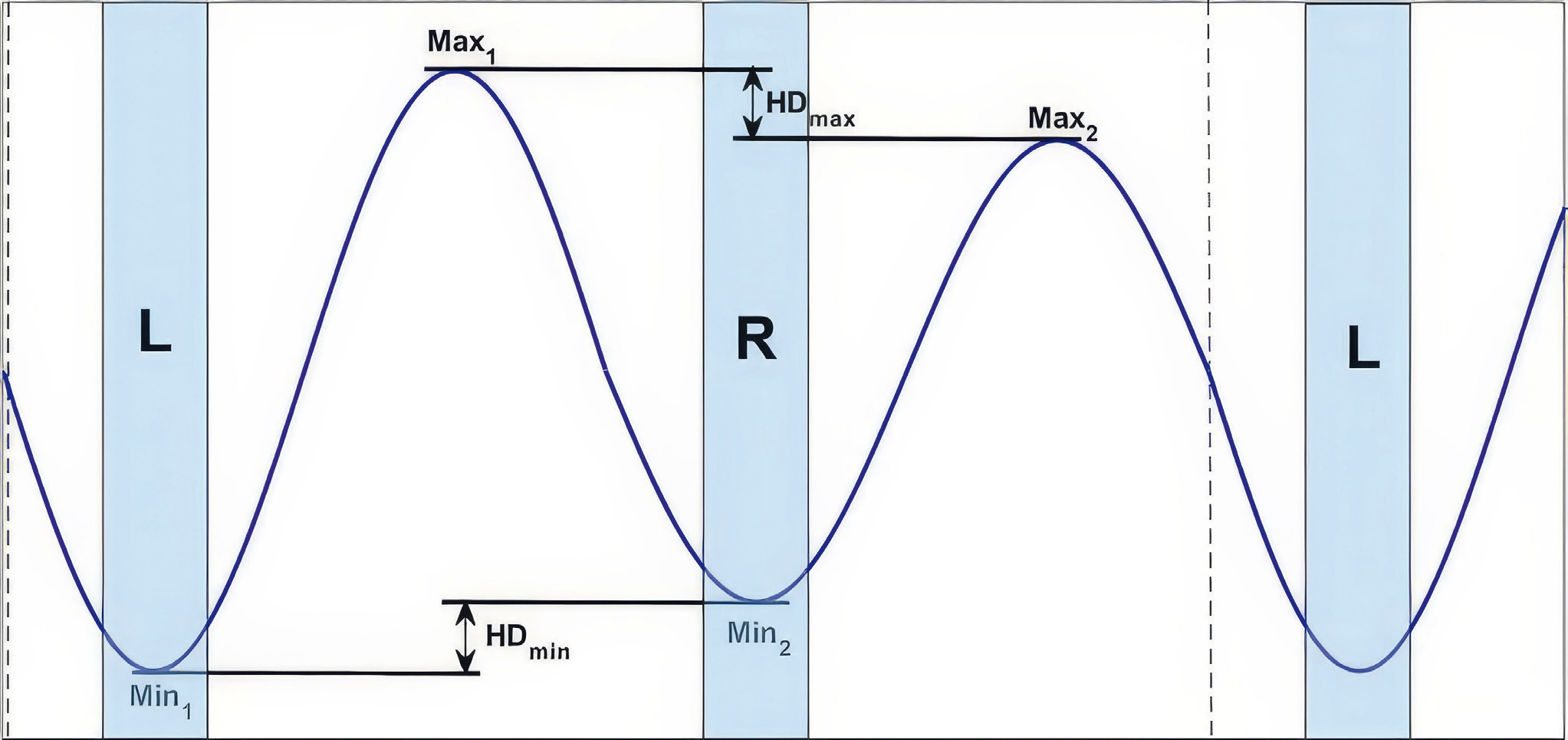
Figur 1. Illustrasjon av endring i vertikal bevegelsesamplitude (blå linje) av hodet hos en hest med høyre frambeinshalthet. Blå felt indikerer venstre (L) og høyre ® frambeins vektbæring. Ved full vektbæring på venstre frambein er hodets bevegelsesamplitude større (hodet synker mer ned) enn under vektbæring på det høyre (halte) frambeinet (hodet synker mindre ned). Reduksjon i bevegelsesamplitude skyldes avlastning av høyre frambein under vektbæring (Min2), samt redusert fraskyv av samme bein (Max2). HDmin og HDmax viser den beregnede forskjellen i vertikal hodebevegelse mellom venstre og høyre frambein.
Figuren er gjengitt fra Rhodin et al. i 2017 (23) med Creative Commons (CC BY).License.
Kroppsmassen til en uhalt hest i trav når sitt laveste punkt under full vektbæring av et diagonalt beinpar, hvilket sammenfaller med maksimal kodeleddsekstensjon (19,27). Ved halthet sees imidlertid redusert ekstensjon av både kode- og hovledd under full vektbæring av det halte beinet (mindre ‘gjennomtredning’ i tåleddene), samt en mild kompensatorisk økt ekstensjon av tilsvarende ledd i det uhalte beinet i det diagonale beinparet (20,28). Halthet fører også til økt fleksjon av proksimale ledd, som er mer uttalt for has enn for skulder(28). Mens redusert ekstensjon av distale ledd indikerer avlastning av ekstremiteter, antas økt fleksjon av proksimale ledd å være en ekstensor-muskelkontrollert “myk bremsing”-mekanisme, som reduserer den maksimale vertikale kraften ved hovnedsett (28). Jo haltere hesten er, jo lavere maksimal vertikal kraft registreres ved hovnedsett av det halte beinet (21).
Halthet fører også til andre avlastningsstrategier. Hesten kan flytte kroppsvekten langs lengdeaksen, til det uhalte beinet i det diagonale beinparet, samt sideveis til det kontralaterale beinet på den uhalte diagonalen (21). For eksempel vil en venstre frambeinshalthet gi økt vektbæring på høyre bakbein via kaudal forflytning av tyngdepunktet (20,21). Sideveis forflytning gir økt vektbæring på høyre frambein, samtidig som belastning av venstre bakbein reduseres (21). Bakbeinshalte hester flytter tyngdepunktet kranialt, slik at det blir økt vektbæring på det diagonale frambeinet,samtidig som sideveis forflytning resulterer i økt belastning av det kontralaterale (uhalte) bakbeinet (29). Adaptasjoner av travsteget og avlastningsmekanismer av det halte beinet oppsummeres i Tabell 1.
Adaptasjon |
Beskrivelse |
|---|---|
Økt stegfrekvens |
Omfordeler den totale vertikale kraften over flere steg ved å øke antall steg brukt for en gitt distanse. |
Økt stegvarighet |
Reduserer maksimal belastning og belastningshastighet ved å la hoven stå lenger på bakken. |
Redusert hastighet |
Reduserer den totale vertikale kraften under belastning av det halte beinet. |
Sideveis vektfordeling |
Omfordeling av belastning fra den halte diagonalen til den uhalte diagonalen; forkorte overgangstiden fra den halte diagonalen til den uhalte diagonalen; og å forkorte svevefasen til den halte diagonalen. |
Kranial/kaudal vektfordeling |
Omfordeling av belastningen fra det halte beinet til det uhalte beinet innenfor det diagonale beinparet; vekt forskjøvet langs hestens lengdeakse avlaster vekten fra det halte beinet mens det øker belastningen i det diagonale uhalte beinet. |
Kompensatorisk halthet
Kompensatorisk halthet oppstår når hesten fremstår halt på et uhalt bein, og kan forklares i avlastningsstrategiene beskrevet over. For bakbeinshalte hester etterlignes halthet i det ipsilaterale frambeinet (29-31), siden tyngdepunktet flyttes kranialt innad i det diagonale beinparet og dermed medfører hode-nikking (31).Halthet i venstre bakbein vil dermed kunne feiltolkes som primær halthet av venstre frambein, på grunn av hodenikking synkront med høyre frambeins hovnedsett (Figur 2). For primært frambeinshalte hester vil kompensatorisk halthet sees hovedsakelig i det diagonale (kontralaterale) bakbeinet på grunn av kaudal vektforskyvning (28,31,32). Dette fenomenet er kjent som ‘law of sides’; primært frambeinshalte hester viser ofte en kontralateral kompensatorisk bakbeinshalthet, og primært bakbeinshalte hester viser ofte kompensatorisk halthet på det ipsilaterale frambeinet. Situasjonen kan imidlertid også være mer kompleks, siden primært frambeinshalte hester også kan vise kompensatorisk halthet i det ipsilaterale bakbeinet (21) eller av og til i begge bakbeina (30). Selv om de fleste studier av kompensatorisk halthet er gjort på hester med indusert halthet (21,28-30), viser hester med naturlig forekommende halthet også de samme mønstrene (31,32). Ved mistanke om kompensatorisk halthet brukes ytterligere diagnostikk, slik som mønstring på bøyd spor, bøyeprøver og diagnostiske injeksjoner for å avdekke primærproblemet.
Bilateral halthet er en annen diagnostisk utfordring siden den vertikale bevegelsesamplituden ikke nødvendigvis er tydelig forskjellig mellom de to halvdelene av travsteget (33). I klinisk praksis brukes undersøkelse på bøyd spor, enten ved longering eller under rytter, for å vurdere eventuelle bilaterale problemer siden trav på bøyd spor kan indusere mer asymmetrisk bevegelse, og dermed forsterke en underliggende bevegelsesasymmetri som ikke er tydelig på rett spor. Undersøkelser på bøyd spor og i høy hastighet vil omtales i del 2 av denne artikkelen.
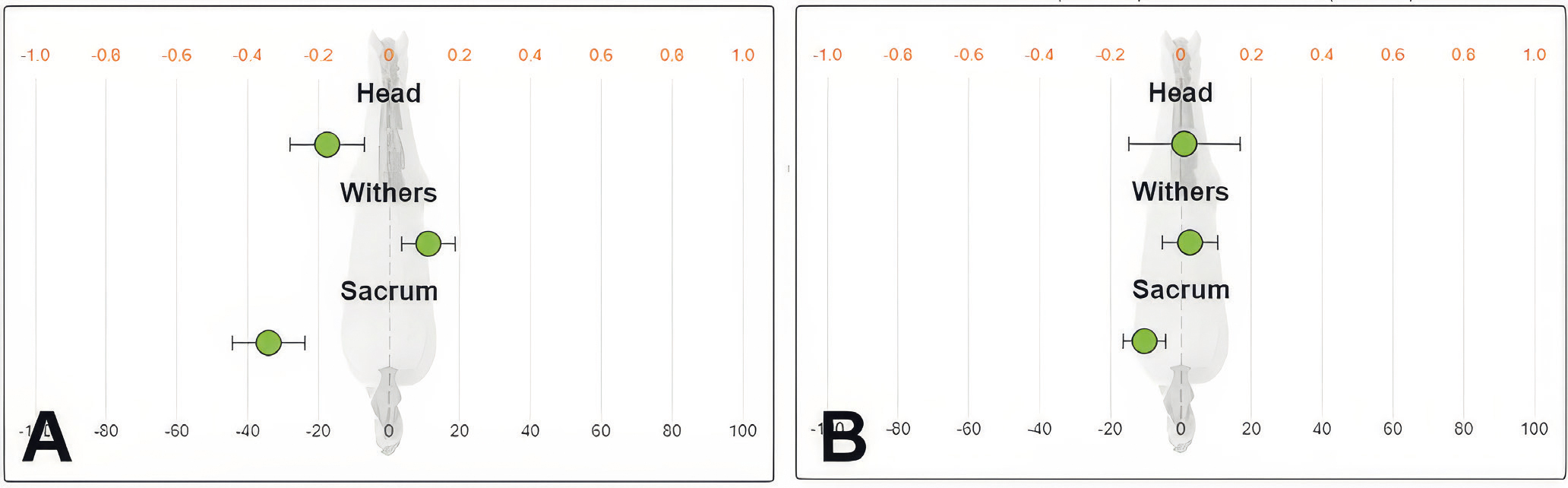
Figur 2. Eksempel på del av dataframstilling fra et IMU system (EquiMoves). De grønne punktene representerer forskjell i bevegelsesamplitude mellom de to diagonalene av travsteget, for henholdsvis hodet, manken og bekken. Ved et helt symmetrisk bevegelsesmønster vil punktene ligge på nullpunktet (symmetrilinjen), midt over figurhesten. Bevegelsesasymmetri vises ved at de grønne punktene flytter seg enten mot venstre (venstresidig asymmetri) eller mot høyre (høyresidig asymmetri) – jo større asymmetrien er, jo lengre vekk fra nullpunktet havner punktene. A: Dataplott fra en hest under mønstring i trav, der hesten har en tydelig ipsilateral venstresidig asymmetri (grønne punkter ligger til venstre for symmetrilinjen). B: Dataplott fra den samme hesten som i A, under mønstring i trav etter lokalbedøvelse av venstre bakkne. Plottet viser en tydelig reduksjon i asymmetri på venstre bakbein etter lokalbedøvelsen. Samtidig er venstre frambeins asymmetri eliminert. Dette funnet viser at hesten hadde en primær venstre bakbeinshalthet, med en kompensatorisk ipsilateral frambeinshalthet.
Subjektiv halthetsundersøkelse
Korrekt identifisering av hvilket bein hesten halter på danner som kjent grunnlaget for at riktig diagnose kan stilles til slutt. Det er bred enighet om at vurdering av hodenikking er det mest nyttige for å gjenkjenne frambeinshalthet (17,24,34). Det er imidlertid forskjellige, og delvis motstridende, beskrivelser av hvilke anatomiske landemerker som vurderes for å identifisere bakbeinshalthet (17,35). De to vanligste metodene går ut på å vurdere vertikal bevegelse og symmetri av tubera sacrale/hele bekkenet (25,31,36) eller tubera coxae (35,37), men avhengig av hestens bygningstrekk vil disse to metodene kunne gi noe ulike resultat. For eksempel resulterte indusert ulik bakbeinslengde i økt asymmetri ved tubera sacrale men ikke ved tubera coxae (38). På den annen side kan vurdering av tubera coxa kompliseres av eksisterende anatomisk asymmetri, for eksempel hos hester med tidligere fraktur av tuber coxae (39). Asymmetrisk bevegelse av tubera coxae er også rapportert hos klinisk uhalte hester (25). I tillegg til ulike strategier for å vurdere bakbeinshalthet, er det som tidligere nevnt en mindre endring i den vertikale bevegelsesamplituden for bakparten sammenlignet med hode og frempart. Dette betyr at det totalt sett som regel er vanskeligere å vurdere bakbeinshalthet enn frambeinshalthet, hvilket også er dokumentert i studier (40-44).
Jevnt over er det kun liten til moderat enighet mellom hestepraktiserende veterinærer om hvilket bein hester halter på (40-44). Naturlig nok er det størst enighet ved undersøkelse av hester med moderat eller markert halthet og for frambeinshalte hester, mens det er minst enighet ved vurdering av hester med mild halthet, eller bakbeinshalthet. Økt erfaring kan forbedre enigheten og korrekt identifikasjon av det halte beinet kun til en viss grad (41,44-46). I en studie ble veterinærer og veterinærstudenter bedt om å vurdere animasjoner av halte og uhalte hester. Totalt sett var det høyere treffsikkerhet i å avgjøre om hesten var halt eller uhalt, enn å tilordne haltheten til et spesifikt bein. Imidlertid ble de uhalte animasjonene (som viste perfekt bevegelsessymmetri) oftere klassifisert som bakbeinshalte av de erfarne veterinærene i studien (44).
Ulikt erfaringsgrunnlag og ulik kunnskap om kompensatoriske mekanismer, samt bruk av ulike metoder som beskrevet over, kan kanskje forklare noe av diskrepansen i subjektive halthetsvurderinger mellom veterinærer. En annen mulig faktor er bias, som er en uunngåelig del av all subjektiv vurdering og som vil påvirke den enkelte veterinærs evne til korrekt vurdering av tilstedeværelsen av eller endring i halthet. For eksempel er det dokumentert stor grad av forventningsbias i forbindelse med vurdering av respons på diagnostiske injeksjoner. Kunnskap om at diagnostiske injeksjoner hadde blitt utført påvirket veterinærenes vurdering av haltheten (45).
Erfaringsgrunnlag og ulike vurderingsstrategier til tross, de fysiske begrensningene av det menneskelige øyet er sannsynligvis den mest kritiske faktoren og største medvirkende årsaken til lav overensstemmelse mellom veterinærer i vurdering av spesielt mild halthet og bakbeinshalthet. For det første er det grenser for hvor raskt øyet kan se (tidsmessig/temporal oppløsning), spesielt for hendelser som krever kognitiv tolkning (47). For det andre er det en visuell terskel for asymmetrideteksjon. Dette ble eksemplifisert i en studie der veterinærer og veterinærstudenter ble bedt om å se på to firkanter på en dataskjerm, som bevegde seg i vertikalplanet basert på tuber coxae markørdata fra ekte hester (48). Hele 25 % forskjell mellom firkantenes vertikale bevegelsesamplitude var nødvendig for visuell deteksjon av asymmetrisk bevegelse, og her spilte erfaring ingen rolle, det var ingen forskjell mellom veterinærene og veterinærstudentene. Dette belyser vanskelighetene med å visuelt fange opp lavgradig halthet, spesielt siden asymmetrivurderingen også skjer under kompliserende forhold siden hesten undersøkes mens den beveger seg i relativt høy hastighet. I sum tyder dette på at det menneskelige øyets temporale oppløsning er for lav til å oppdage mindre eller inkonsekvente asymmetrier. Derimot kan svært små bevegelsesavvik registreres av ulike teknologiske verktøy. Riktig bruk av slike verktøy kan dermed bidra til å raffinere halthetsundersøkelsen, samt å begrense subjektiv bias for eksempel i tolkning av respons på diagnostiske injeksjoner. Ulike systemer for objektiv halthetsanalyse omtales i det følgende.
Objektiv halthetsundersøkelse
Halthet medfører endringer både i vertikal kraft gjennom steget, og endringer i bevegelsesmønsteret. Kinetisk teknologi, slik som trykkplater, måler krefter direkte og har vært brukt i forskningsøyemed siden 1980-tallet, men er for arbeidskrevende for klinisk bruk. Derimot er kinematisk teknologi, som beregner bevegelse, svært velegnet for bruk i klinisk praksis. Over de siste ti-årene har flere kinetiske systemer til bruk under halthetsundersøkelser blitt kommersielt tilgjengelig (Tabell 2), og dette sammenfaller med en markant økning i vitenskapelige studier av objektive bevegelsesdata fra ridehester (23,49-51), galopphester (52-54)og travhester (55-58).
Optical motion capture (mocap) kamerateknologi

Figur 3. Reflektive markører er festet på hest og rytter for registrering av bevegelser hos ekvipasjen i samspill, ved bruk av infrarøde Optical Motion Capture (mocap) kameraer som registrerer bevegelse av markørene fra flere ulike vinkler samtidig. For bruk til hest er mocapsystemet fra Qualisys AB markedsledende, da dette selskapet har utviklet en egen programvare til halthetsanalyse av hest (QHorse). Bildet er tatt under et pågående forskningsprosjekt ved bruk av Qualisys og QHorse ved Dyresykehuset Hest, NMBU finansiert via Stiftelsen Hästforskning/Norges Forskningsråd (prosjektnummer H-23-47-772).
Foto: Anne S Kallerud.
Optical motion capture (mocap) brukes innen bevegelsesanalyse av toppidrettsutøvere så vel som av dyr, samt innen film- og dataspillbransjen for å generere spesialeffekter basert på naturlig bevegelse. Mocap baserer seg på at flere infrarøde kameraer fanger opp samme bevegelse av reflektive markører festet på objektet (for eksempel hesten) fra flere ulike vinkler samtidig. Registreringen må skje i et pre-definert volum (for eksempel en ridehall) der kameraene er montert i riktig høyde og avstand til hverandre. Systemets programvare registrerer markørenes forflytning i volumet, og lager en 3D-modell samt regner ut ønskede parametere, for eksempel asymmetriparametere til hjelp ved halthetsundersøkelse. Teknologien regnes som gullstandard for analysering av bevegelsesasymmetri hos hest på grunn av stor nøyaktighet og svært lav feilmargin. Mocap brukes dermed hyppig til valideringsstudier av annen type kinetisk teknologi, slik som sensorbaserte og KI-baserte systemer. Ulempen med mocap er høye investeringskostnader og krav til infrastruktur for installasjon av kameraene. I Norge finnes ett slikt system for bevegelsesanalyse av hest ved Dyresykehuset Hest, NMBU, der systemet brukes både til objektiv halthetsanalyse av kliniske pasienter samt til forskning. Som forskningsverktøy brukes mocap ofte til mer enn kun måling av asymmetri hos hesten, som for eksempel ved et pågående prosjekt på NMBU der hest og rytters bevegelser analyseres i samspill (Figur 3).
Inertial Measurement Unit (IMU) sensorbasert teknologi
Mens mocap baserer seg på at kameraer fanger opp bevegelse av reflektive markører, baserer IMU-systemer seg på å feste måleinstrumenter direkte på hesten. Slike måleinstrumenter, som med en fellesbetegnelse kalles IMU sensorer, måler gravitasjon, endring i akselerasjon og endring i retning (rotasjon)(59-61). Ettersom små og lette IMU sensorer monteres på spesifikke anatomiske punkter på hesten, og målingene overføres direkte til en bærbar datamaskin, er IMU systemer velegnet for bruk i felt både under en vanlig halthetsundersøkelse, men også for datainnsamling under trening, inkludert i løpsbanen (62).
Som tidligere beskrevet baserer asymmetrimålinger seg på endringer i den vertikale bevegelsesamplituden av hesten i trav. Akselerasjons- og rotasjonsverdier målt av IMU sensorene blir matematisk oversatt av systemprogramvaren til vertikal forskyvning, slik at endringer i vertikal bevegelsesamplitude, og dermed asymmetri, kan kvantifiseres (63,64). Ulike IMU-systemer legger ulike matematiske algoritmer til grunn for denne endelige asymmetri-beregningen, hvilket forhindrer direkte sammenligning av asymmetriparameterne mellom de ulike systemene (Tabell 2). En annen begrensning ved IMU-baserte systemer er at de på grunn av akkumulerte integrasjonsfeil ved beregning av forskyvning påvirkes av såkalt sensordrift (61). Sensordrift kan imidlertid begrenses (61), men også andre faktorer, slik som temperatur, mangelfull kalibrering eller unøyaktig sensorplassering kan føre til feilmålinger.
Brukt riktig, gir likevel IMU-baserte systemer pålitelige registreringer av bevegelsesasymmetri (65-67) og endringer i asymmetri (36,60,68-71), i tillegg til at slike systemer utkonkurrerer veterinærer i påvisning av spesielt lavgradig asymmetri. Eksempler på validerte, kommersielt tilgjengelige IMU-baserte systemer brukt i veterinærmedisin er Equinosis Lameness Locator®, EquiMoves®/EquiPro® og EquiGait®. Flere av disse systemene er undersøkt for ytelse sammenlignet med gullstandarden mocap (Qualisys) (61,72). Det finnes imidlertid en rekke andre ikke-validerte produkt på markedet. Slike produkter markedsføres ofte til dels aggressivt mot ryttere og trenere, for eksempel med løfte om at det kun er nødvendig med én enkelt sensor, festet et mer eller mindre tilfeldig sted på hesten. Som veterinær bør man kun benytte validerte systemer, da man ikke kan stole på data fra ikke-validerte produkt siden disse ikke er undersøkt med tanke på nøyaktighet og presisjon. Som fagpersoner bør veterinærer også informere sine kunder om potensielle fallgruver ved bruk av ikke-validert teknologi.
Både mocap og IMU sensorbaserte systemer krever at man fester et definert antall markører eller IMU sensorer til hestens kropp. De seneste årene har det imidlertid blitt utviklet enda en ny teknologi for bevegelsesanalyse, som ikke krever noen form for markører eller sensorer, men kun benytter seg av en smarttelefon.
Kunstig Intelligens (KI)-basert teknologi (Computer vision)
Computer vision, også kalt kunstig syn eller datasyn, er en type KI som innebærer at digitale bilder eller video tolkes av en programvare, opplært til å identifisere spesifikke gjenstander eller bevegelser via maskinlæring. Kunstig syn kan på sikt revolusjonere deler av medisinfaget, for eksempel ved rask og effektiv bildediagnostikk(73). Per i dag finnes én slik programvare for halthetsanalyse av hest, tilgjengelig som en applikasjon for iPhone® (SleipAI®). Produsenten anbefaler bruk av en nyere iPhone®-modell (modell 8 eller nyere med multikamera-oppsett), samt at telefonen monteres på et stativ under opptaket for å minimere bevegelse av telefonen under filming. Hesten mønstres og/eller longeres som vanlig og filmes via applikasjonen, som registrerer over 100 anatomiske punkter på hesten og gjennom dette kvantifiserer grad av bevegelsesasymmetri (Figur 4) (74). Fordelen med dette systemet er at det ikke krever investering i infrastruktur eller annet utstyr enn en egnet telefon og et app-abonnement. Veterinæren kan også velge å gi hesteeieren tilgang til å filme hesten i SleipAI®-appen hjemme, for eksempel for oppfølging etter et veterinærbesøk, som vil gi veterinæren tilgang til video og analyse av hesten også uten et fysisk møte.
En valideringsstudie fant i gjennomsnitt 2,2 mm forskjell i asymmetri målt via SleipAI® versus et mocap system (Qualisys). Det var imidlertid relativt store variasjoner mellom systemene (0,0 – 8,7 mm for hodet og 0,0-6,5 mm for bekken) mellom målte hester (74). I 2024 publiserte forfatterne av denne artikkelen en studie om grad av samsvar mellom to IMU-sensorbaserte systemer (Equinosis Lameness Locator® og EquiMoves®) og SleipAI® (75). Det var moderat samsvar mellom de tre systemene, som i hovedsak var sammenlignbare i å identifisere hvilket bein som viste asymmetri, men med enkelte avvik grunnet forskjeller i antall analyserte steg mellom systemene, samt forskjeller i bearbeiding og framstilling av data. Ikke overraskende var det størst samsvar mellom de to sensorbaserte systemene. Resultatene fra denne studien understreker viktigheten av å være kjent med det systemet man bruker, for å unngå feilaktig tolkning av data.
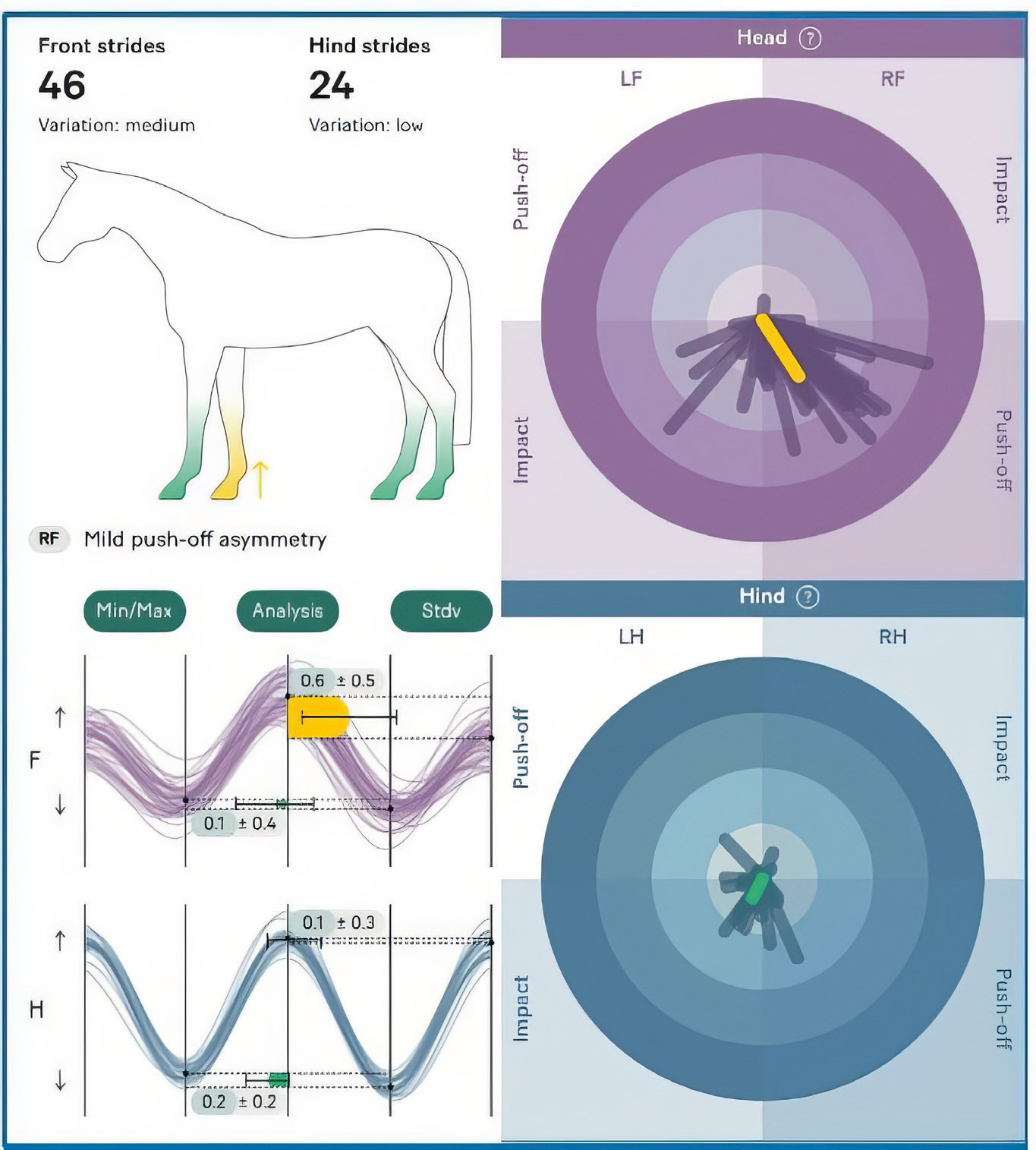
Figur 4. Eksempel på dataframstilling fra Sleip AI®. Øverst til venstre vises en illustrasjon av en hest der beina fargekodes ut ifra asymmetrigrad. Grønn representerer ingen asymmetri, mens gul farge representerer mild asymmetri. Retningen på pilen indikerer impact asymmetri dersom pilen peker nedover, alternativt pushoff asymmetri dersom pilen peker oppover. Øverst i bildet sees antall steg som er inkludert i analysen, samt et estimat på steg-variabiliteten. Nederst til venstre er hvert enkelt travsteg plottet som en sinuskurve; lilla kurver viser vertikal amplitude av hodet gjennom travsteget, mens blå kurver viser vertikal amplitude av bekkenet. Forskjellen mellom den beregnede maksimum og minimum posisjon av hodet og bekken er også gitt som gjennomsnitt og standardavvik. De to høyre panelene viser klokkediagram der hver enkelt strek representerer ett steg, henholdsvis for frambein (høyre øvre panel) og for bakbein (høyre nedre panel). Den fargede streken viser gjennomsnittet av alle stegene, som også gir kvantitativ (farge og streklengde) og kvalitativ (retning mot push-off eller impact) informasjon.
Tolkning av objektive bevegelsesdata
Som nevnt over, forutsetter bruk av objektive systemer god kjennskap til hvordan utstyret fungerer slik at pålitelige og nøyaktige data registreres. Kvaliteten av dataanalysen avhenger av kvaliteten av rådatasettet. Enkle grep for å optimalisere dataregistrering er å sørge for at hesten blir mønstret på et jevnt underlag med fri hodeholdning over en tilstrekkelig distanse slik at det aktuelle systemet registrerer mange nok steg for en valid analyse. Det er likeledes svært viktig at asymmetriregistreringene tolkes på riktig måte. For eksempel må hvert enkelt datasett analyseres med tanke på antall steg, standardavvik og amplitude (grad av asymmetri) for den enkelte variabel for å ha nytteverdi i en halthetsutredning. Høye standardavvik i forhold til amplitude vitner om stor variabilitet mellom stegene, og en slik måling må dermed tolkes med langt større forsiktighet enn en måling med lave standardavvik. I denne konteksten er det imidlertid viktig å være klar over at uhalte hester som regel har større standardavvik i forhold til asymmetriamplituden enn halte hester; amplituden vil imidlertid være lav.
Med innføringen av objektive målesystemer med så høy oppløsning at selv den minste asymmetri kan registreres oppstår spørsmålet: Hva er ‘normal’ eller ‘biologisk’ asymmetri? Hos hester, som hos alle biologiske vesener, vil det være urimelig å forvente perfekt bevegelsessymmetri, og per i dag vites lite om den naturlige biologiske asymmetrivariansen i hestepopulasjonen. En mulig løsning for å skille normal fra unormal asymmetri er å etablere terskelverdier for asymmetrivariablene for det enkelte objektive systemet, basert på kliniske data fra halte hester (Tabell 2). Terskelverdier er publisert for ett av de kommersielt tilgjengelige IMU sensorsystemene, Equinosis Lameness Locator (76). Ekstrapolering av terskelverdier mellom hestepopulasjoner kan imidlertid være problematisk, eksemplifisert ved at en stor andel (> 70 %) av sportshester i vanlig trening, ansett som uhalte av eierne sine, hadde asymmetriverdier over disse terskelverdiene ved mønstring i trav (23).Lignende resultater er også dokumentert i andre studier der hestene ble vurdert som uhalte av sine eiere eller trenere, både for varmblods ridehester (49,50), poloponnier i trening (51) og galopphester (52), og høyere terskelverdier for galopphester har blitt foreslått basert på samsvar mellom visuell (subjektiv) vurdering av asymmetrisk bevegelse og objektivt innsamlede data (53).
Bruk av sensitiv teknologi kan åpenbart medføre en viss risiko for overdiagnostisering av halthet basert på ‘for nøyaktige’ målinger av bevegelsesasymmetri, og betydelige variasjoner i asymmetri fra dag til dag har blitt dokumentert hos uhalte hester (77). Man kan imidlertid gå ut ifra at asymmetri som overstiger denne daglige variasjonen som regel representerer halthet, og det er disse verdiene som ligger til grunn for klinisk brukte terskelverdier både for mocap systemet Qualisys og for IMU-systemet EquiMoves®/ EquiPro® (Tabell 2). Videre er graden av asymmetri målt hos antatt uhalte hestene sammenlignbar med graden av asymmetri hos hester med indusert halthet (78) og hos hester med klinisk halthet som responderte på diagnostisk analgesi (32,79). Omfattende subjektive halthetsundersøkelser av antatt friske hester har også dokumentert halthet hos en stor andel av hestene (80,81). Det er dermed mange faktorer som peker mot at den høye forekomsten av asymmetrisk bevegelse dokumentert i flere ulike hestepopulasjoner ved bruk av objektive systemer ikke skyldes ‘for nøyaktige’ målinger, men snarere dokumenterer asymmetrier som kan være av klinisk relevans.
Som nevnt over er kunnskap om begrensningene til enhver teknologi som brukes til halthetsanalyse avgjørende for hensiktsmessig bruk. Et viktig aspekt ved de fleste objektive teknologiene er at de i stor grad baserer seg på kun én eller noen få målte variabler, slik som vertikal akselerasjon eller forflytning. Selv om variablene er nøyaktig målt, må disse også sees i lys av en helhetlig klinisk vurdering av hesten som omfatter mange andre vurderinger, og veterinæren må ikke la seg friste til å ignorere eller nedprioritere vurderinger som ikke lar seg måle objektivt (82).
Equinosis Q® Lameness Locator |
EquiPro® / Equimoves® |
SleipAI® |
Q-Horse Qualisys® (Mocap) |
|
|---|---|---|---|---|
Teknologi |
IMU sensorer. Akselerasjon konverteres til hastighet og deretter til bevegelse |
IMU sensorer. Akselerasjon konverteres til hastighet og deretter til bevegelse |
2D kamera. Markørløs automatisert gjenkjenning av anatomiske landemerker ved hjelp av kunstig intelligens (Computer Vision) |
3D Kamera. Triangulering av reflektoriske markører i et pre-definert volum ved bruk av flere infrarøde kamera. |
Prisklasse |
$$ |
$$$ |
$ (abonnement) |
$$$$ |
Antall sensorer/ markører |
3 batteridrevne IMU sensorer (Hodet, høyre frambein, tuber sacrale) |
7 batteridrevne IMU sensorer (hodet, tuber sacrale, manken, alle fire bein) |
Ingen |
Reflektoriske markører. Klinisk: 5 (hode, manken, tuber sacrale og tuber coxae). Forskning: Avhengig av hva man ser på. |
Dataoverføring |
Bluetooth (Begrenset avstand) |
WiFi (ubegrenset avstand for opptak, må være i nærheten for overføring av data fra sensorene) |
Trenger godt internettsignal pga store datamengder (wifi/ 5G). Videoene lastes opp, analyseres remote og resultatene lastes ned. |
Stasjonær installasjon. |
Behøver kalibrering |
Nei |
Ja (nødvendig for å kunne gi reelle mm verdier) |
Nei |
Ja |
Hardware |
Tablet + IMU sensorer |
Tablet + IMU sensorer |
IPhone® 8 eller nyere (+ stativ) |
Flere kamera (avhengig av volum), datamaskin, markører |
Video og datasynkronisering |
Nei |
Nei |
Ja |
Ja |
Enhet av asymmetrivariablene |
Estimerte millimeter basert på amplituden av bevegelsen. Kan ikke sammenlignes direkte med de andre systemene |
Millimeter (reelle) |
Asymmetriskala basert på forskjellen i ROM mellom sidene (max og min verdiene) + grafisk fargerepresentasjon av asymmetrigrad og type asymmetri (push off vs. impact). Systemet justerer asymmetri av frambein i forhold til ROM annerledes enn bakbein for å justere for amplitudeforskjeller. Justerer også for mankehøyde. |
Millimeter (reelle) |
Analyser av ekstremiteter |
Stegfrekvens |
Protraksjon, retraksjon, abduksjon, adduksjon, varighet av vektbæring, stegfrekvens |
Stegfrekvens |
Mulig i forskningskontekst, ikke til klinisk bruk. |
Analysert gangart |
Trav |
Registrerer data i trav, skritt, galopp, tølt, men produserer analyser kun i trav. |
Trav |
Klinisk: Trav. Forskning: Alle gangarter |
Terskelverdier |
Hode: ± 6 mm Tuber sakrale: ± 3 mm |
Ingen publiserte verdier. I praksis bruker man rapporterte verdier for daglig variasjon i symmetri (78): Hode: ±13 mm Tuber sakrale: ±5 mm. |
Ingen publiserte referanseverdier |
Ingen publiserte verdier. I praksis bruker man rapporterte verdier for daglig variasjon i symmetri (77): Hode: ±13 mm Tuber sakrale: ±5 mm. |
Svakheter/ begrensninger |
|
|
|
|
|
|
|
|
|
Veterinærmedisinsk bruk av objektive bevegelsesdata
Det har vært en økning i mengden objektive data som er samlet inn og analysert fra ridehester (23,49-51) og galopphester (52-54), mens det finnes fortsatt svært lite objektivt målte asymmetridata for travhester utover enkelte studier utført i Sverige (57,58) og Norge (55,56). Det kan være spesielt utfordrende å vurdere travhester for halthet, da mønstring i trav for hånd ikke alltid samsvarer med halthet i løpsbanen (84), og den observerte graden av halthet kan variere med travhastigheten (83). Siden travhester ofte trener og konkurrerer på ovale baner, er dette et ekstra element som spiller inn i halthetsvurderingen. Halthetsundersøkelse på bøyd spor og på tredemølle som kan simulere løpshastighet, omtales i del 2 av denne artikkelen.
Fremtidig bruk av og forskning på objektive bevegelsesdata bør fokuseres spesielt innen to områder: muligheter for å skille mellom biologisk asymmetri og smerteindusert asymmetri (halthet), og forholdet mellom tilstedeværelse av asymmetri som kan representere subklinisk halthet, og utvikling av halthet over tid. For den enkelte pasient kan veterinæren skille mellom biologisk asymmetri og smerteindusert asymmetri (halthet) ved bruk av diagnostiske injeksjoner. Selv om dette er standard praksis på enkeltindividnivå, egner det seg ikke som et verktøy for screening av et stort antall hester, både på grunn av tids- og kostnadsbegrensninger samt risiko for alvorlige bivirkninger for eksempel fra intraartikulære injeksjoner (84-86). En annen måte å vurdere den kliniske relevansen av asymmetri på, er å følge en større gruppe hester longitudinelt for å vurdere utviklingen av asymmetri over tid. Svenske varmblodstravere fulgt over halvannet år viste mer bevegelsesasymmetri i intensive treningsperioder (57), og galopphester i Tyskland og Storbritannia viste mer halthet og skader i den mer intensive trenings-/løpssesongen om våren (9,11). Til tross for store fremskritt innen veterinærmedisinen de siste tiårene, både når det gjelder kunnskap om halthetsmekanismer og utredninger, tilgjengeligheten av bildediagnostiske modaliteter og behandlingsmuligheter, viser epidemiologiske studier av galopphester at det er kun liten endring i andelen tapte treningsdager på grunn av ortopediske skader (8). Flere land har de siste årene innført et enkelt sensorsystem for registrering av hestens fart, steglengde og stegfrekvens under galoppløp. Hittil har analyse av over 25,000 løpsstarter vist at de hestene som pådro seg en ortopedisk skade i et løp hadde redusert fart og steglengde i inntil seks løp før skaden inntraff (87-89). Denne type observasjoner gir håp om at teknologiske løsninger kan bidra til fremtidig skadeforebygging, spesielt for løpshester, i langt større grad enn det man klarer med tradisjonelle metoder i dag.
Konklusjon
Subjektiv halthetsundersøkelse begrenses av det menneskelige øyets temporale oppløsning, som kun oppfatter relativt store bevegelsesavvik. Derimot kan svært små avvik registreres av ulike teknologiske verktøy. Riktig bruk av slike verktøy kan bidra til å raffinere halthetsundersøkelsen, samt å begrense subjektiv bias. Det finnes mange ulike systemer å velge mellom – det aller viktigste er likevel å velge et validert system og å sette seg grundig inn i både datainnsamling og ikke minst datatolkningen for å få fullt utbytte av systemet, men også for å unngå feiltolkning. På sikt vil objektive verktøy for bevegelsesanalyse med all sannsynlighet også kunne plukke opp endringer i asymmetri som kan representere subklinisk halthet, og dermed bidra til å forebygge ortopediske skader hos spesielt løpshester. For å sitere Prof. Knottenbelt fra 2017: ‘Teknologi vil ikke erstatte veterinæren, men veterinærer som bruker teknologi vil utkonkurrere veterinærer som ikke bruker det’ (90).
Sammendrag
Halthetsundesøkelser utgjør en stor del av praksisen til hestepraktiserende veterinærer. Tradisjonell halthetsundersøkelse foregår visuelt, og dermed subjektivt, der presisjonsnivået kan øke med erfaring og trening. Halthet kjennetegnes av asymmetrisk bevegelse i trav, og hester bruker flere ulike avlastningsstrategier for å redusere belastning av det vonde beinet. På grunn av det menneskelige øyes iboende begrensninger, er subjektiv halthetsvurdering likevel ikke alltid pålitelig selv når den utføres av erfarne praktikere, spesielt for lavgradig halthet og for bakbeinshalthet. Objektive verktøy som registrerer kun små avvik i bevegelsessymmetri kan dermed komplementere den subjektive undersøkelsen og være nyttige verktøy spesielt for å fange opp lavgradig halthet og bakbeinshalthet. Mens optical motion capture kamerateknologi regnes som gullstandarden for bevegelsesanalyse, er slike systemer kostbare og for det meste begrenset til universitetshospitaler. Portable systemer for bevegelsesanalyse, slik som sensor-baserte systemer, tillater objektiv bevegelsesanalyse også i felt og har vært kommersielt tilgjengelig i flere ti-år. Nylig er et system basert på kunstig intelligens blitt stadig mer populært, ikke minst på grunn av at det er svært enkelt i bruk. Uavhengig av hvilket system som benyttes for objektiv halthetsanalyse, er kunnskap om begrensningene til den aktuelle teknologien avgjørende for hensiktsmessig bruk og for å unngå feiltolkning av data.
Summary
Lameness evaluation is one of the main activities performed by an equine clinician. The identification of lameness has traditionally been done visually and therefore subjectively, where the level of precision may improve by training and experience. Lameness leads to movement asymmetry at the trot, and horses use different strategies to reduce load on the lame limb. However, due to the inherent limitations of the human eye, subjective lameness evaluation is not always reliable even when performed by experienced practitioners, especially for recognizing low-grade and hindlimb lameness. The use of objective lameness evaluation tools, which are highly sensitive in registering movement asymmetry, may complement the subjective evaluation and can augment the clinicians’ ability to detect low grade and hindlimb lameness. While optical motion capture systems are considered the gold standard for movement analysis, such systems are costly and mostly limited to research facilities. Horse-mounted inertial measurement unit (IMU) systems allow objective gait analysis in a field setting and have been commercially available for several decades. Recently, a markerless system based on artificial intelligence, has become increasingly popular. Regardless of the system used, knowledge of the limitations of the technology in question is necessary to ensure optimal use and to avoid misinterpretation of data.
Referanser
Ross MW. Lameness in horses: basic facts before starting. I: Ross MW, Dyson SJ, eds. Diagnosis and management of lameness in the horse. 2nd ed. London: Elsevier; 2011:3-7.
Penell JC, Egenvall A, Bonnett BN, Olson P, Pringle J. Specific causes of morbidity among Swedish horses insured for veterinary care between 1997 and 2000. Vet Rec 2005;157:470-7.
Egenvall A, Tranquille CA, Lönnell AC, Bitschnau C, Oomen A, Hernlund E et al. Days-lost to training and competition in relation to workload in 263 elite show-jumping horses in four European countries. Prev Vet Med 2013;112:387-400.
Singer ER, Barnes J, Saxby F, Murray JK. Injuries in the event horse: training versus competition. Vet J 2008;175:76-81.
Johnson SA, Donnell JR, Donnell AD, Frisbie DD. Retrospective analysis of lameness localisation in western performance horses: a ten-year review. Equine Vet J 2021;53: 1150-8.
Putnam JRC, Holmes LM, Green MJ, Freeman SL. Incidence, causes and outcomes of lameness cases in a working military horse population: a field study. Equine Vet J 2014;46:194-7.
Bailey CJ, Rose RJ, Reid SWJ, Hodgson DR. Wastage in the Australian Thoroughbred racing industry: a survey of Sydney trainers. Aust Vet J 1997;75:64-6.
Dyson PK, Jackson BF, Pfeiffer DU, Price JS. Days lost from training by two- and three-year-old Thoroughbred horses: a survey of seven UK training yards. Equine Vet J 2008;40:650-7.
Lindner A, Dingerkus A. Incidence of training failure among Thoroughbred horses at Cologne, Germany. Prev Vet Med 1993;16:85-94.
Olivier A, Nurton JP, Guthrie AJ. An epizoological study of wastage in Thoroughbred racehorses in Gauteng, South Africa. J S Afr Vet Assoc 1997;68:125-9.
Ramzan PHL, Palmer L. Musculoskeletal injuries in Thoroughbred racehorses: a study of three large training yards in Newmarket, UK (2005-2007). Vet J 2011;187:325-9.
Bertuglia A, Bullone M, Rossotto F, Gasparini M. Epidemiology of musculoskeletal injuries in a population of harness Standardbred racehorses in training. BMC Vet Res 2014;10:11.
Dolvik NI, Gaustad G. Estimation of the heritability of lameness in standardbred trotters. Vet Rec 1996;138:540-2.
Gaustad G, Kjærsgaard P, Dolvik NI. Lameness in three-year-old standardbred trotters. Influence of parameters determined during the first year of life. J Equine Vet Sci 1995;15:233-9.
Steel CM, Hopper BJ, Richardson JL, Alexander GR, Robertson ID. Clinical findings, diagnosis, prevalence and predisposing factors for lameness localised to the middle carpal joint in young Standardbred racehorses. Equine Vet J 2006;38:152-7.
Vigre H, Chriél M, Hesselholt M, Falk-Rønne J, Kjær Ersbøll A. Risk factors for the hazard of lameness in Danish Standardbred trotters. Prev Vet Med 2002;56:105-17.
Ross MW. Movement. I: Ross MW, Dyson SJ, eds. Diagnosis and management of lameness in the horse. 2nd ed. London: Elsevier, 2011:66-70.
Keegan KG. Gait analysis for the quantification of lameness. I: Ross MW, Dyson SJ, eds. Diagnosis and management of lameness in the horse. 2nd ed. London: Elsevier, 2011:245-51.
Hobbs SJ, Clayton HM. Sagittal plane ground reaction forces, centre of pressure and centre of mass in trotting horses. Vet J 2013;198(Suppl 1):e14-9.
Clayton HM, Schamhardt HC, Willemen MA, Lanovaz JL, Colborne GR. Kinematics and ground reaction forces in horses with superficial digital flexor tendinitis. Am J Vet Res 2000;61:191-6.
Weishaupt MA, Wiestner T, Hogg HP, Jordan P, Auer JA. Compensatory load redistribution of horses with induced weight-bearing forelimb lameness trotting on a treadmill. Vet J 2006;171:135-46.
Buchner HH, Obermüller S, Scheidl M. Body centre of mass movement in the lame horse. Equine Vet J Suppl 2001;33:122-7.
Rhodin M, Egenvall A, Haubro Andersen P, Pfau T. Head and pelvic movement asymmetries at trot in riding horses in training and perceived as free from lameness by the owner. PLoS One 2017;12:e0176253.
Baxter GM, Stashak TS. Examination for lameness. In: Baxter GM, ed. Adams & Stashak’s lameness in horses. 6th ed. Oxford: Wiley-Blackwell, 2011:115.
Buchner HHF, Savelberg HHCM, Schamhardt HC, Barneveld A. Head and trunk movement adaptations in horses with experimentally induced fore- or hindlimb lameness. Equine Vet J 1996;28:71-6.
Keegan KG. Evidence-based lameness detection and quantification. Vet Clin North Am Equine Pract 2007;23:403–23.
McGuigan MP, Wilson AM. The effect of gait and digital flexor muscle activation on limb compliance in the forelimb of the horse Equus caballus. J Exp Biol 2003;206:1325-36.
Buchner HHF, Savelberg HHCM, Schamhardt HC, Barneveld A. Limb movement adaptations in horses with experimentally induced fore- or hindlimb lameness. Equine Vet J 1996;28:63-70.
Weishaupt MA, Wiestner T, Hogg HP, Jordan P, Auer JA. Compensatory load redistribution of horses with induced weightbearing hindlimb lameness trotting on a treadmill. Equine Vet J 2004;36:727-33.
Kelmer G, Keegan KG, Kramer J, Wilson DA, Pai PF, Singh P. Computer-assisted kinematic evaluation of induced compensatory movements resembling lameness in horses trotting on a treadmill. Am J Vet Res 2005;66:646-55.
Uhlir C, Licka T, Kübber P, Peham C, Scheidl M, Girtler D. Compensatory movements of horses with a stance phase lameness. Equine Vet J Suppl 1997;23:102-5.
Maliye S, Voute LC, Marshall JF. Naturally-occurring forelimb lameness in the horse results in significant compensatory load redistribution during trotting. Vet J 2015;204:208-13.
Pfau T, Noordwijk K, Sepulveda Caviedes MF, Persson-Sjodin E, Barstow A, Forbes B et al. Head, withers and pelvic movement asymmetry and their relative timing in trot in racing Thoroughbreds in training. Equine Vet J 2018;50:117-24.
Buchner HH, Savelberg HH, Schamhardt HC, Barneveld A. Bilateral lameness in horses: a kinematic study. Vet Q 1995;17:103-5.
Peham C, Licka T, Girtler D, Scheidl M. Supporting forelimb lameness: clinical judgement vs. computerised symmetry measurement. Equine Vet J 1999;31:417-21.
May SA, Wyn-Jones G. Identification of hindleg lameness. Equine Vet J 1987;19:185-8.
Kramer J, Keegan KG, Kelmer G, Wilson DA. Objective determination of pelvic movement during hind limb lameness by use of a signal decomposition method and pelvic height differences. Am J Vet Res 2004;65:741-7.
Pfau T, Spicer-Jenkins C, Smith RK, Bolt DM, Fiske-Jackson A, Witte TH. Identifying optimal parameters for quantification of changes in pelvic movement symmetry as a response to diagnostic analgesia in the hindlimbs of horses. Equine Vet J 2014;46:759-63.
Vertz J, Deblanc D, Rhodin M, Pfau T. Effect of a unilateral hind limb orthotic lift on upper body movement symmetry in the trotting horse. PLoS One 2018;13:e0199447.
Ross MW. Observation. Symmetry and posture. I: Ross MW, Dyson SJ, eds. Diagnosis and management of lameness in the horse. 2nd ed. London; Elsevier, 2011:37.
Fuller CJ, Bladon BM, Driver AJ, Barr ARS. The intra- and inter-assessor reliability of measurement of functional outcome by lameness scoring in horses. Vet J 2006;171:281-6.
Hammarberg M, Egenvall A, Pfau T, Rhodin M. Rater agreement of visual lameness assessment in horses during lungeing. Equine Vet J 2016;48:78-82.
Keegan KG, Dent EV, Wilson DA, Janicek J, Kramer J, Lacarrubba A et al. Repeatability of subjective evaluation of lameness in horses. Equine Vet J 2010;42:92-7.
Leelamankong P, Estrada R, Mählmann K, Rungsri P, Lischer C. Agreement among equine veterinarians and between equine veterinarians and inertial sensor system during clinical examination of hindlimb lameness in horses. Equine Vet J 2020;52:326-31.
Starke SD, Oosterlinck M. Reliability of equine visual lameness classification as a function of expertise, lameness severity and rater confidence. Vet Rec 2019;184:63.
Arkell M, Archer RM, Guitian FJ, May SA. Evidence of bias affecting the interpretation of the results of local anaesthetic nerve blocks when assessing lameness in horses. Vet Rec 2006;159:346-8.
Starke SD, May SA. Veterinary student competence in equine lameness recognition and assessment: a mixed methods study. Vet Rec 2017;181:168.
Holcombe AO. Seeing slow and seeing fast: two limits on perception. Trends Cogn Sci 2009;13:216-21.
Parkes RSV, Weller R, Groth AM, May S, Pfau T. Evidence of the development of “domain-restricted” expertise in the recognition of asymmetric motion characteristics of hindlimb lameness in the horse. Equine Vet J 2009;41:112-7.
Pfau T, Jennings C, Mitchell H, Olsen E, Walker A, Egenvall A et al. Lungeing on hard and soft surfaces: movement symmetry of trotting horses considered sound by their owners. Equine Vet J 2016;48:83-9.
Rhodin M, Roepstorff L, French A, Keegan KG, Pfau T, Egenvall A. Head and pelvic movement asymmetry during lungeing in horses with symmetrical movement on the straight. Equine Vet J 2016;48:315-20.
Pfau T, Parkes RS, Burden ER, Bell N, Fairhurst H, Witte TH. Movement asymmetry in working polo horses. Equine Vet J 2016;48:517-22.
Pfau T, Noordwijk K, Sepulveda Caviedes MF, Persson-Sjodin E, Barstow A, Forbes B et al. Head, withers and pelvic movement asymmetry and their relative timing in trot in racing Thoroughbreds in training. Equine Vet J 2018;50:117-24. Dette er samme som ref. 33!
Pfau T, Sepulveda Caviedes MF, McCarthy R, Cheetham L, Forbes B, Rhodin M. Comparison of visual lameness scores to gait asymmetry in racing Thoroughbreds during trot in-hand. Equine Vet Educ 2020;32:191-8.
Sepulveda Caviedes MF, Forbes BS, Pfau T. Repeatability of gait analysis measurements in Thoroughbreds in training. Equine Vet J 2018;50:513-8.
Kallerud AS, Fjordbakk CT, Hendrickson EHS, Persson-Sjodin E, Hammarberg M, Rhodin M et al. Objectively measured movement asymmetry in yearling Standardbred trotters. Equine Vet J 2021;53:590-9.
Kallerud AS, Hernlund E, Byström A, Persson-Sjodin E, Rhodin M, Hendrickson EHS et al. Non-banked curved tracks influence movement symmetry in two-year-old Standardbred trotters. Equine Vet J 2021;53:1178-87.
Ringmark S, Jansson A, Lindholm A, Hedenström U, Roepstorff L. A 2.5 year study on health and locomotion symmetry in young Standardbred horses subjected to two levels of high intensity training distance. Vet J 2016;207:99-104.
Jansson A, Ringmark S, Johansson L, Roepstorff L. Locomotion asymmetry in young Standardbred trotters in training and links to future racing career. Comp Exerc Physiol 2022;18:85-92.
Pfau T, Weller R. Comparison of a standalone consumer grade smartphone with a specialist inertial measurement unit for quantification of movement symmetry in the trotting horse. Equine Vet J 2017;49:124-9.
Keegan KG, Kramer J, Yonezawa Y, Maki H, Pai PF, Dent EV et al. Assessment of repeatability of a wireless, inertial sensor-based lameness evaluation system for horses. Am J Vet Res 2011;72:1156-63.
Bosch S, Serra Bragança F, Marin-Perianu M, Marin-Perianu R, van der Zwaag BJ, Voskamp J et al. EquiMoves: a wireless networked inertial measurement system for objective examination of horse gait. Sensors (Basel) 2018;18:850.
Barrey E, Auvinet B, Couroucé A. Gait evaluation of race trotters using an accelerometric device. Equine Vet J Suppl 1995;18:156-60.
Keegan KG, Pai PF, Wilson DA. A curve-fitting tehnique for evaluating head movement to measure forelimb lameness in horses. Biomed Sci Instrum 2000;36:239-44.
Keegan KG, Pai PF, Wilson DA, Smith BK. Signal decomposition method of evaluating head movement to measure induced forelimb lameness in horses trotting on a treadmill. Equine Vet J 2001;33:446-51.
Olsen E, Haubro Andersen P, Pfau T. Accuracy and precision of equine gait event detection during walking with limb and trunk mounted inertial sensors. Sensors (Basel) 2012;12:8145-56.
Sapone M, Martin P, Ben Mansour K, Château H, Marin F. Comparison of trotting stance detection methods from an inertial measurement unit mounted on the horse’s limb. Sensors (Basel) 2020;20:2983.
Starke SD, Witte TH, May SA, Pfau T. Accuracy and precision of hind limb foot contact timings of horses determined using a pelvis-mounted inertial measurement unit. J Biomech 2012;45:1522-8.
Keegan KG, Yonezawa Y, Pai PF, Wilson DA, Kramer J. Evaluation of a sensor-based system of motion analysis for detection and quantification of forelimb and hind limb lameness in horses. Am J Vet Res 2004;65:665-70.
Keegan KG, MacAllister CG, Wilson DA, Gedon CA, Kramer J, Yonezawa Y et al. Comparison of an inertial sensor system with a stationary force plate for evaluation of horses with bilateral forelimb lameness. Am J Vet Res 2012;73:368-74.
Pfau T, Robilliard JJ, Weller R, Jespers K, Eliashar E, Wilson AM. Assessment of mild hindlimb lameness during over ground locomotion using linear discriminant analysis of inertial sensor data. Equine Vet J 2007;39:407-13.
Reed SK, Kramer J, Thombs L, Pitts JB, Wilson DA, Keegan KG. Comparison of results for body-mounted inertial sensor assessment with final lameness determination in 1,224 equids. J Am Vet Med Assoc 2020;256:590-9.
Pfau T, Witte TH, Wilson AM. A method for deriving displacement data during cyclical movement using an inertial sensor. J Exp Biol 2005;208:2503–14.
Larsen M, Aglen CF, Lee CI, Hoff SR, Lund-Hanssen H, Lång K et al. Artificial intelligence evaluation of 122 969 mammography examinations from a population-based screening program. Radiology 2022;303:502-11.
Lawin FJ, Byström A, Roepstorff C, Rhodin M, Almlöf M, Silva M et al. Is markerless more or less? Comparing a smartphone computer vision method for equine lameness assessment to multi-camera motion capture. Animals (Basel) 2023;13:390.
Kallerud AS, Marques-Smith P, Bendiksen HK, Fjordbakk CT. Objective movement asymmetry in horses is comparable between markerless technology and sensor-based systems. Equine Vet J 2025;57:115-25.
Equinosis. The Equinosis with lameness locator user manual LL2017 v.1.1. https://equinosis.support/collections/user-manuals
Hardeman AM, Serra Bragança FM, Swagemakers JH, van Weeren PR, Roepstorff L. Variation in gait parameters used for objective lameness assessment in sound horses at the trot on the straight line and the lunge. Equine Vet J 2019;51:831-9.
Rhodin M, Pfau T, Roepstorff L, Egenvall A. Effect of lungeing on head and pelvic movement asymmetry in horses with induced lameness. Vet J 2013;198(Suppl 1):e39-45.
Maliye S, Marshall JF. Objective assessment of the compensatory effect of clinical hind limb lameness in horses: 37 cases (2011–2014). J Am Vet Med Assoc 2016;249:940-4.
Dyson S, Greve L. Subjective gait assessment of 57 sports horses in normal work. A comparison of the response to flexion tests, movement in hand, on the lunge, and ridden. J Equine Vet Sci 2016;38:1-7.
Dyson S, Routh J, Bondi A, Pollard D. Gait abnormalities and ridden horse behaviour in a convenience sample of the United Kingdom ridden sports horse and leisure horse population. Equine Vet Educ 2020;34:84-95.
Dyson S. Recognition of lameness: man versus machine. Vet J 2014;201:245-8.
Mitchell JB, Mitchell JS, Nolan PM, Ross MW. The North American Standardbred. I: Ross MW, Dyson SJ, eds. Diagnosis and management of lameness in the horse. 2nd ed. London: Elsevier, 2011:1014-22.
Lapointe JM, Laverty S, Lavoie JP. Septic arthritis in 15 standardbred racehorses after intra‐articular injection. Equine Vet J 1992;24:430-4.
Steel CM, Pannirselvam RR, Anderson GA. Risk of septic arthritis after intra-articular medication: a study of 16,624 injections in Thoroughbred racehorses. Aust Vet J 2013;91:268-73.
Persson-Sjodin E, Hernlund E, Pfau T, Haubro Andersen P, Holm Forsström K, Rhodin M. Effect of meloxicam treatment on movement asymmetry in riding horses in training. PLoS One 2019;14:e0221117.
Morrice-West AV, Hitchens PL, Walmsley EA, Stevenson MA, Wong ASM, Whitton RC. Variation in GPS and accelerometer recorded velocity and stride parameters of galloping Thoroughbred horses. Equine Vet J 2021;53:1063-74.
Wong ASM, Morrice-West AV, Whitton RC, Hitchens PL. Changes in Thoroughbred speed and stride characteristics over successive race starts and their association with musculoskeletal injury. Equine Vet J 2023;55:194-204.
Mc Sweeney D, Holmström M, Donohue KD, Lambert DH, Bayly WM. Using accelerometers to identify a high risk of catastrophic musculoskeletal injury in three racing Thoroughbreds. J Am Vet Med Assoc 2024;262:1242-50.
Knottenbelt, DC. Using the past to make the future better: the long and winding road. 56th Annual Congress British Equine Veterinary Association. Plenary opening lecture. Liverpool 2017:30-1.